Nowadays, in the numerical control processing of many parts, the finished parts of the first step are to be removed first, and then the second step is performed on another tooling or another machining center of the same work bench with the newly processed surface as the positioning reference. Processing. It is usually necessary to turn and rotate the part by a certain angle, and then translate it to another tool for machining. This completes the entire processing of the part in sequence. Sometimes multiple machining centers are placed in one place, sometimes with face-to-face placement or any combination of two placements. Some machines use the same machine tool, but also use different types of machine tools to complete the processing of the entire part. When the part is loaded from one tooling to another, it must be turned and rotated. While being flipped and rotated, its position also changes. The traditional way is to install a six-axis articulated robot on a large linear motion track. The entire robot system, either installed on the ground or installed in the air, takes up a lot of space and is costly. Therefore, Shenyang Rhine Robot Co., Ltd. customized and developed a series of six-axis hybrid robots based on the actual needs of customers. These new features come from our experience and understanding. They have their limitations and inadequacies. They are only for reference by friends. The following will introduce two new applications of the hybrid six-axis robot with a combination of two applications. A. Hybrid Six-axis Robot Introduction 1, the composition of the hybrid robot As shown in FIG. 1 , the six-degree-of-freedom hybrid robot consists of three linear motion axes based on a Cartesian robot and three rotational axes of the end of the joint robot. The three linear motion axes are defined as the X axis, the Y axis, and the Z axis, which can be either the cantilevered three-axis Cartesian coordinate robot in FIG. 1 or the gantry-type three-axis Cartesian coordinate robot. The three rotation axes at the lower end of the Z axis are the rotation axis A from the top downward, and the rotation axis C and the rotation axis B and the B axis end. The end of the C axis is usually equipped with a robot gripper. Three rotary axes can be selected in two configurations. One axis is the three servo motors shown in Fig. 1 and is mounted on the lower end of the Z axis. One is that three servo motors are directly mounted on the corresponding reducer, so that the movement position is more accurate. According to actual needs, the linear motion axis of the hybrid robot may also be a two-dimensional XY-axis structure or an XZ-axis structure, or a gantry structure. The travel and load carrying capacity of each linear motion axis can be done as required. Figure 1 is a typical hybrid six-axis robot consisting of a cantilevered 3D Cartesian robot and three axes of rotation. In FIG. 1, a grip is mounted on the endmost rotation axis. 2, the characteristics of hybrid robots 1) Large work space With the large travel of the Cartesian coordinate robot, the advantages of large span. For example, after the assembly, the X axis can reach 100m, and the Y axis can reach 20m; in short, it can be assembled into large robots that require working space. 2) Flexible combination The linear motion axis of the hybrid robot may also be a two-dimensional XY axis structure or an XZ axis structure, or a gantry structure. According to the stroke and bearing capacity of each linear motion axis, multiple combinations can be used to ensure that each axis is not deformed and has sufficient strength. The last three rotary axes can also be selected as two rotary axes. In short, the hybrid robot can be completely designed into the structure and work schedule. 3) Large load capacity The rectangular coordinate type gantry frame structure has strong bearing capacity, can be infinitely expanded, is stable and reliable, and the cost is relatively low. The ability to grasp objects is primarily limited by the three end rotating axes. At present, the weight of objects that can be grasped with the claws is 50 kg, 100 kg and 200 kg. 4) High positioning accuracy In general, the repetitive positioning accuracy of a single linear motion axis is 0.05 mm, while that of a screw driven type and a precision gear rack is up to 0.01 mm or even higher. It is also possible to add position feedback signals, such as magnetic beads, to improve positioning accuracy. The final comprehensive accuracy depends on the three rotation axes at the end. However, the repeatability of the final end is higher than that of a similar joint robot. 5) Easy to install The hybrid robot is a modular structure that is all pre-connected at the assembly plant, and is then disassembled and shipped from the factory. The site is simply assembled by bolts, and the level can be adjusted electrically. Users can even complete the mechanical installation by themselves. The gantry frame is the entire installation space and its working space is also within the framework. There is no need for very professional staff adjustments, simple installations, adjustments, and later service fees are low. 6) The control system is relatively simple The hybrid robot is a combination of Cartesian coordinates and cylindrical coordinates, which is not only easy to understand but also simple to control. Easy programming, development. No special special high-grade control system is required. 7) Lower maintenance costs Do not need very professional adjustment, simple installation, adjustment and post-maintenance costs are low. The programming and manipulation of the joint robot must be completed by the supplier through professional training (the manufacturer software programming cost is 300 yuan/hour), and the special software needs to be charged. 8) Cost-effective: Regardless of the first purchase, or late-stage service costs are lower than the articulated robots. Second, in the exhaust pipe processing applications As shown in Fig. 2, there are two work tools on one workbench on Ticaret, and two exhaust pipes are installed in different orientations. In this way, different positions of the exhaust pipe can be processed on one work bench. The difficulty lies in removing the B work piece first, and then removing the A work piece and placing it on the B tooling in two directions of rotation. Pull the exhaust pipe from the previous machining center onto tooling A. Another difficulty here is that the space around the two exhaust pipes is small, making it more difficult to load and unload. Figure 2: A workbench with two completely different orientations of tooling In order to improve efficiency, as shown in Fig. 3, a six-axis hybrid robot is used to automatically load and unload four sets of Lijia. Based on these requirements, Shenyang Rheinland Robot Co., Ltd. has designed and manufactured two sets of 6D hybrid robots with large strokes and heavy loads. Electric Floor Scrubber,Tile Floor Scrubber,Tile Floor Cleaning Machine,Automatic Floor Cleaning Machine Nantong Weizhuo Environmental Protection Equipment Co.,Ltd , https://www.cwznts.com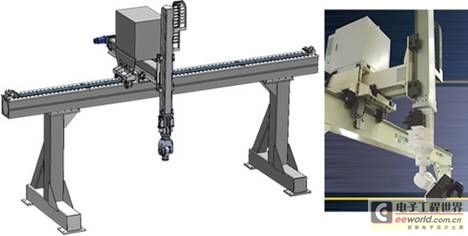

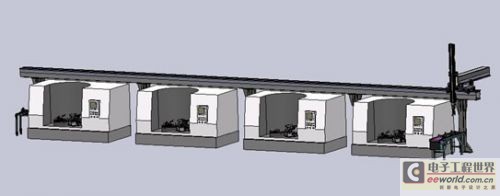
Fig. 3: A six-degree-of-freedom hybrid robot gives four stands and blanks.
Foreword
Pagination: 12